在科幻小說和電影的描繪中,未來的機器人已具備成熟的認知與行為智慧,能夠在人類社會中以「類人」的外表和行為模式與人類共處,同時又有超越人腦的算力和智力。儘管此種想像目前仍然是遙遠未來的願景,機器人成為人類社交空間中的自然存在還有很長的路要走,但在認知科學、社會科學、與資料科學等跨領域協作發展的推動下,社交機器人研究的快速進展正在幫助我們更接近此一現實。
人機共生的歷史與展望
「人機共生」的概念最早可追溯到1960年計算先驅J.C.R. Licklider的開創性論文[1],他提出「人機共生是人與電腦合作互動的必然發展」,這一觀點預言了認知計算將是可編程計算的必要和自然演變。隨著AI技術的發展,認知計算的研究進入了嶄新的時代,並在2011年誕生首個認知服務系統IBM Watson[2]。
近年來,機器人製造、感測、控制技術等不斷精進,社交型機器人逐漸受到關注。這些機器人不僅能夠因應外在環境的變動而做出回應,還能夠觀測人類情緒狀態並給予安撫的行為。社交型機器人開始應用於零售、教育、醫療等領域,完成各種任務,從提供人機界面諮詢到教導學習,再到提供生活協助或陪伴功能。這些應用有助於解決社會少子化、老齡化帶來的勞動力不足問題,同時提高人們對AI機器人的接受度。
社交型機器人的應用與挑戰
未來社會,機器人將進入人們生活的方方面面,不僅作為生產協作的自動化工具,各種型態的社交型機器人將逐漸扮演個人管家、陪伴者的角色。因此,人們需要能夠在日常情況下與人安全互動的機器人,保障使用者的生命、財產安全,同時在互動中關注個人化的心理需求,不侵犯個人隱私,不勾起創傷回憶等。
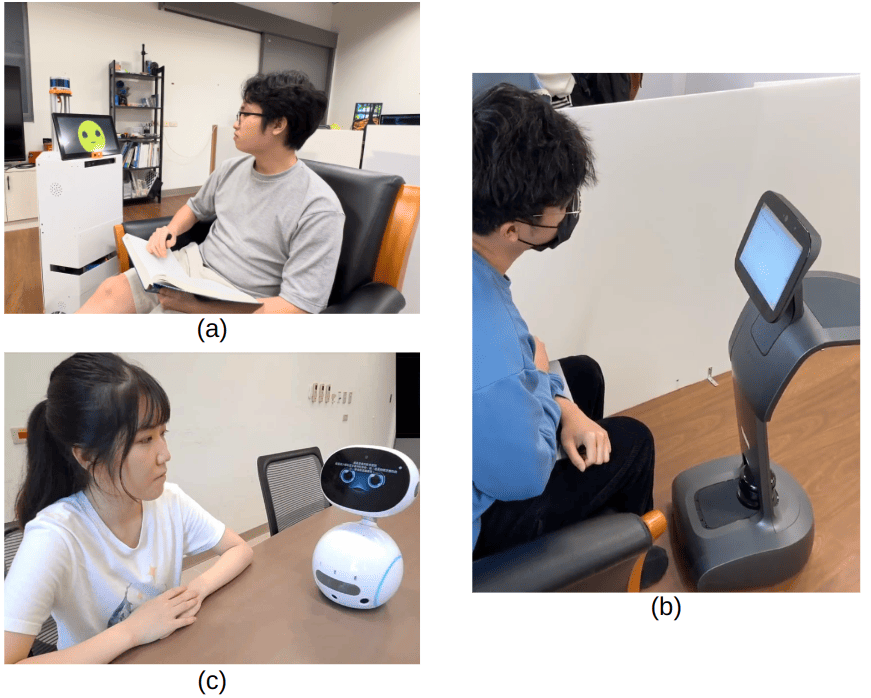
目前活躍於機器人實驗室的各式社交型機器人:(a) OREO(實驗室自行研發);(b) Temi;(c) Zenbo Junior。
然而,設計一種能夠贏得人類信賴的社交型輔助機器人並非易事。這要求機器人具備深層認知能力,能夠預測自己行為的影響以及周圍人的行為和需求。為了實現這一目標,亟需開發一整合物理系統與經驗知識的認知決策架構,以實現在無約束環境的自然互動、獲取和使用經驗的需求控制、反饋學習等目標。此外,一般的服務者或照護者很少具備廣泛的知識背景以回應複雜多變的需求,也難以關注使用者的心理狀態。因此,在機器人的認知方面引入認知科學、社會科學、心理學知識,是一個必然的趨勢。這種跨學科的合作不僅能夠提供更深入的理解,還能夠為機器人的設計和應用提供更有價值的指導。
近年來在社交機器人上的研究
循著上述的思路,認知能力之於社交機器人的重要性不言而喻,因此我們也積極引入認知理論到人與機器人互動(HRI)研究。而這些研究又可依據不同的認知能力,歸納出幾個面向:
空間認知及自主移動行為
人類在新環境中的輕鬆移動和目的地導航背後,是由上而下的認知概念形成的運動策略。而機器人也同樣能夠以多模態感測器,如LiDAR、RGB-D相機、距離感測器和麥克風陣列等,來模仿人類針對空間與移動的「認知」能力。例如在我們針對移動能力的研究中[3],能使機器人在移動的過程中順利預測周遭人們的行徑,認知其導航時需禮讓且體貼,以便機器人在人群中能和諧地移動。另外,針對空間認知的能力,我們也開發出一個機器人系統:只須提供室內環境的樓層平面圖,機器人便可如一個進入陌生環境的人類般,透過解讀平面圖來判斷自身位於該空間何處,並建立認知地圖[4]達成高階導航任務。此外,我們也利用深度 AI 技術進一步強化機器人的空間認知能力,讓機器人自主地去理解自身周遭的環境,以語音的方式和使用者溝通,並完成使用者想要的服務。如我們其中一個研究中,便是讓機器人作為一個迎賓大使:在溝通後能推論出外賓們想去的房間或環境,再將其接待到該處;另一個研究則是讓機器人作為一個智能管家:在理解了人們的請求後,迅速地協助確認家中環境的狀況或是否有異狀等。
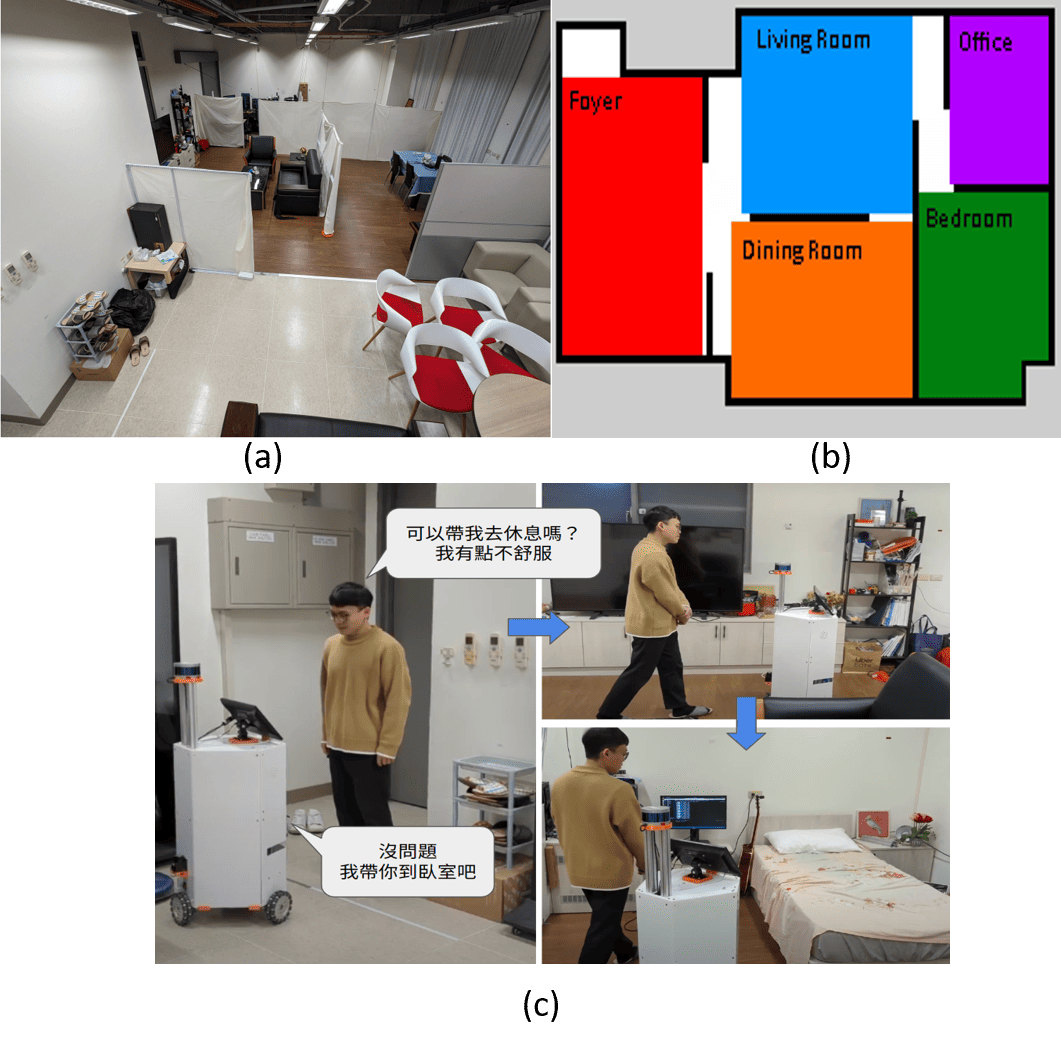
機器人透過語音理解其意圖,並將人們帶到其想去的地方。(a) 模擬居家環境的實驗場域;(b) 居家環境的平面圖;(c) Dave 與機器人OREO的互動狀況。
社交認知及適當互動
構建人物印象是實現機器人社交認知的一個重要方面。機器人需要通過長期的互動,了解使用者的記憶線索、認知水平和偏好資料。這使機器人能夠成為貼心的陪伴者和照護者,特別是在遠端醫療的輔助角色中。因此我們也通過與醫療機構的合作,將部分專業知識轉化為可讀取的資料,並以社交機器人作為溝通的媒介,提供病人期盼的資訊或諮詢[5],試圖解決社會面臨的高齡化、少子化和專業人才不足的問題。而在陪伴者方面,我們透過引入對人類情緒的認知能力以及 AI 技術,使機器人能認知到人們是否處於負面情緒,便能讓機器人在與人們的日常對話中,展現符合人類社會準則、具有同理心的對談,或為使用者提供情緒安撫。而研究像這樣具有社交認知的智慧機器人,我們相信就能使智慧機器人更好地作為一個有同理心和專業知識的照護者,融入人們的生活中。
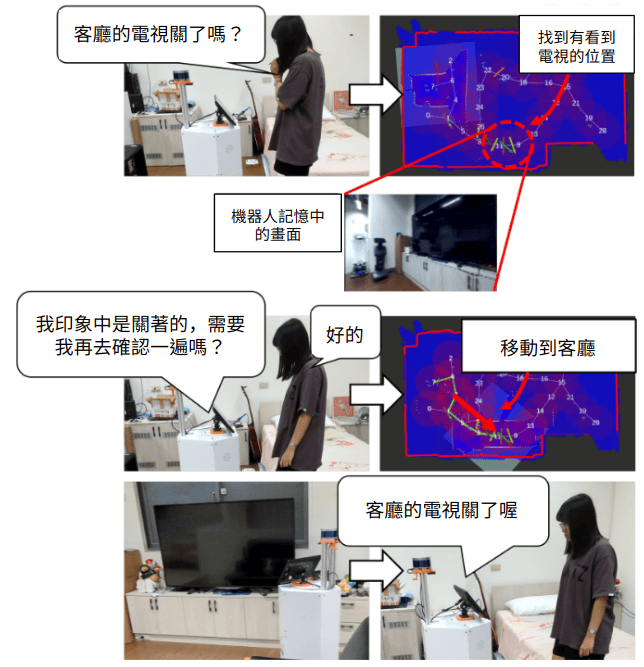
機器人根據自身對環境的理解,協助人類確認家中的環境狀況。
自傳式記憶模型的應用
根據認知模型理論,人類的認知受到過往回憶、當下環境和客觀事實的影響。自傳式記憶包括情節記憶和語意記憶,前者由重要事件構成,後者與客觀事實有關。而在我們的研究中,為了建構具有深度認知的AI社交機器人,機器人需要能夠理解外在環境、具備常識,並分析使用者過往記憶和客觀事實。因此,我們透過結合一個能模擬使用者自傳式記憶[6]的記憶模型,讓使用者能在與機器人的互動中,以自然語言紀錄、取出與自身相關的記憶,使機器人成功達到為使用者達提供記憶輔助之目的。這樣的研究,我們希望能有助於提供長者和記憶功能障礙者的記憶輔助,使機器人成為一個有智慧的陪伴、照護者。
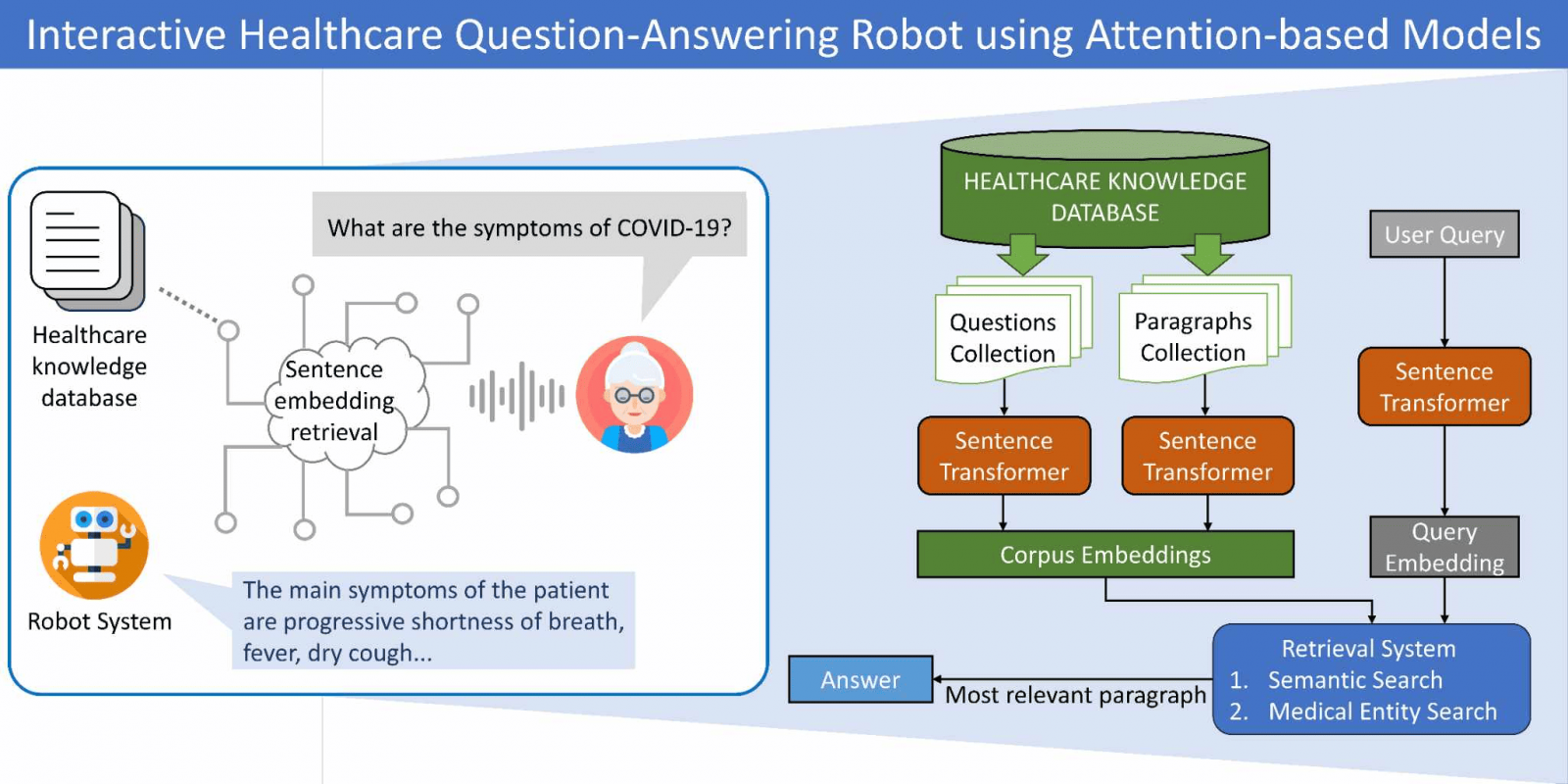
透過與社交機器人的對話互動,使用者能更輕易地取得所需的專業醫療資訊。

榮獲18屆國家新創獎的社交型機器人系統:CHARM (Companion Healthcare Aide Robot Manager)。
結語
走向未來的社交機器人不僅需要先進的技術支持,更需要跨學科的合作,尤其是與心理學的結合。這不僅是為了製造更智能、更能夠適應人類需求的機器人,也是為了創造一個能夠真正與人類共生、互動的未來。這一漫長而有挑戰性的道路上,科學家、工程師和心理學家的共同努力將引領我們進入一個新的人機共生的時代。(本專題策畫/物理治療學系鄭素芳教授&理學院葉素玲副院長&工學院江茂雄院長&工學院林沛群副院長)
參考資料:
[1] Licklider, Joseph CR. “Man-computer symbiosis.” IRE Transactions on Human Factors in Electronics, Vol. HFE-1, No. 1, pp. 4-11 (1960).
[2] High, Rob. “The era of cognitive systems: An inside look at IBM Watson and how it works,” IBM Corporation, Redbooks (2012).
[3] Chen, Hao-Yun, Pei-Han Huang, and Li-Chen Fu, “Social crowd navigation of a mobile robot based on human trajectory prediction and hybrid sensing,” Autonomous Robots, Vol. 47, pp. 339-351 (2023).
[4] Russell A Epstein, Eva Zita Patai, Joshua B Julian & Hugo J Spiers, “The cognitive map in humans: spatial navigation and beyond,” Nature Neuroscience, Vol. 20, No. 11, pp. 1504-1513 (2017).
[5] Chang, Y.-H., Y.-T. Guo, Li-Chen Fu, M.-J. Chiu, H.-M. Chiu, and H.-J. Lin, “Interactive Healthcare Robot using Attention-based Question-Answer Retrieval and Medical Entity Extraction Models,” IEEE Journal of Biomedical and Health Informatics, Vol. 27, No. 12, pp. 6039-6050 (2023).
[6] Conway, Martin A. and Christopher W. Pleydell-Pearce, “The construction of autobiographical memories in the self-memory system,” Psychological Review Vol. 107, No. 2, pp. 261-288 (2000).
傅立成小檔案
1981年畢業於臺灣大學電機系,1983年赴美深造,1987年獲美國加州大學柏克萊分校電機電腦領域博士學位後,返國加入臺灣大學資訊系與電機系任教,並分別自2007年和2020年起被授予何宜慈講座教授和臺大講座教授頭銜。2005至2008年擔任臺大主任秘書,現任臺大人工智慧與機器人研究中心主任。他的研究興趣包括社交機器人、智慧家庭、智慧醫療、擴增/虛擬實境、影像偵測/追蹤,以及控制理論與應用等。傅教授在他的專業領域非常活躍並受到高度推崇;曾任「2003 IEEE 機器人與自動化國際會議(ICRA)」和「2004 IEEE 控制應用會議(CCA)」的議程主席,國內方面,受邀擔任國科會控制學門召集人(2010-2012)。編輯工作方面,曾任IFAC控制期刊Automatica副主編(1996-1999),現任Asian Journal of Control主編(1999-迄今)。由於傑出的學術聲譽,獲選亞洲控制協會(ACA)總裁(2012-2013)、IEEE控制系統學會(CSS)副總裁(2017-2018)。
傅教授在其約35年的學術生涯中,獲得許多獎項肯定,包括:國科會傑出研究獎、十大傑出青年獎、教育部產學合作獎、教育部學術獎、有庠科技獎座、教育部國家講座;在國際認可方面,獲選IEEE Fellow、IFAC Fellow、IEEE CSS傑出講師,以及亞洲控制協會(ACA)頒發“Wook Hyun Kwon教育獎”、IEEE CSS傑出會員獎。