


~智慧機器人> 具自主導航之智慧仿生機器狗設計與實現
近年來「人工智慧」與「仿生機器人」在技術上已有重大突破,越來越多研究單位與公司投入。「仿生技術」主要透過觀察生物之特徵(結構設計、運動姿態等),使機器人能夠展現類似於生物之特殊功能;而仿生機器狗即為其中具代表性且已商品化之研究主題,只是國內相關研究仍在起步中。
由於傳統之輪型機器人難以在顛簸路面、階梯與門檻等地形移動;相較之下,機器狗在這些複雜地形(例如軌道或樓梯等)具備高度之適應能力,同時也具有相當程度之負載能力。此外,透過倒入自主導航、影像辨識與機器學習等人工智慧技術,使機器狗能兼具「高靈活度」與「智慧性」。未來,此一研究可應用於軌道車輛巡檢、倉儲貨物遞送或危險環境之救援工作等,對目前產業嚴重缺工之巡檢及物品遞送提出一個適應不同地面環境之解決方案。
多連桿驅動之機器狗機構設計
本研究中,設計一長420.3mm、寬241.2mm、高177.9mm之四足機器狗研究雛形,為降低驗證階段之研發成本,全身連桿機構使用PLA材質之3D列印方式完成,此一機器人尺寸如圖1所示。機器人腳底使用HT33矽膠製作可防地面打滑。市面上之機器狗大多採用馬達放置於關節處之直驅設計,會導致機器狗之腿部重量與尺寸較大,影響外觀,對於足部運動控制也造成困擾。因此,本研究設計出一種多連桿驅動之創新機構,將所有馬達集中於機器狗身體上方。
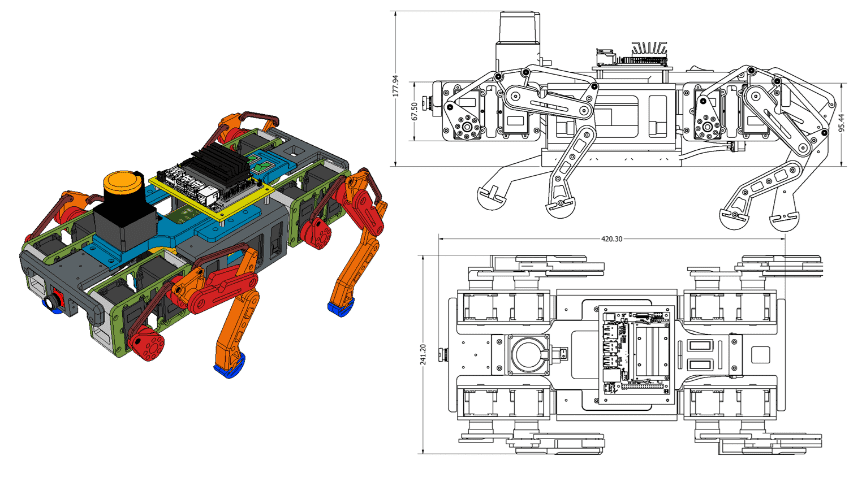
圖1:仿生機器狗之設計圖
此一足部機構之多連桿設計如圖2所示,小腿的連桿設計使用兩組等長平行四連桿與中間三連桿機構組合,於P4 和P7點運用軸承,使其於固定點同軸轉動,而稱為曲桿與馬達相接,馬達控制曲桿轉動而驅動整體連桿機構;大腿之連桿則採用一組平行四連桿進行帶動,其中P4與P5為固定點,為曲桿與馬達相接帶動整體大腿運動;於大腿與小腿驅動馬達之前方還配有一側向轉動之馬達,可帶動大小腿之平面連桿機構側向之旋轉,最終機器狗單腿具有三顆馬達、具備三個自由度,可以實現空間中X、Y、Z軸之移動。而在機器狗之身體內部,我們採用了NVIDIA Jetson Nano做為核心運算電腦,對未來導航、視覺與AI演算法提供一體積小、高效能之運算平台,並且架設許多感測器,像是雷射雷達、九軸慣性感測器與視覺模組。

圖2:多連桿驅動之足部設計
機器狗運動學與步態規劃
為設計出能穩定行走之仿生機器狗,步態規劃是非常關鍵的核心要素之一;透過觀察狗之運動軌跡與步態,建置機器狗運動仿效模型。然而,要使機器狗能夠達到行走軌跡追蹤,尚需四足之逆向運動學與精準之角度控制,同時考量到各關節之活動範圍,及足部末端點與地面之接觸等情形。上述之逆向運動學主要求解足部末端點與身體在一姿態下,映射到各馬達角度之關係,本研究利用三角函數與向量關係式來求解逆向運動學,並拆解為兩個部分來計算(Z-Y與X-Z平面),如圖3(左)所示。最終,將逆向運動學結果透過Matlab進行初步之模擬與驗證,以求得腿部之運動範圍,如圖3(右)所示。

圖3:逆向運動學分析圖(左);腿部運動範圍模擬(右)
一般情況下,狗在向前邁步前會在空中擺出一圓弧曲線,稱為「擺動相」,這不但能提高步行之穩定性,同時降低腳與地面之摩擦,而擺動相觸地後,會有一個向後踢之動作,稱之為「支撐相」,作用是將身體往前帶動,產生有效之向前步行(參考圖4左);透過以上兩種不同相之切換,即可組合出各種步態。機器狗行走常見的步態分別為Walk和Trot兩類,如圖4(中)所示。黑色框是擺動相,白色框為支撐相;Walk步態節奏較慢,行走時採用三腳支撐一腳擺動之方式,其行走時之穩定度較高;而Trot步態節奏較快,行走時採相對腳支撐,相對腳擺動之方式。此外,為了使機器狗達到全向運動,本研究還規劃了第三種原地轉向之步態(參考圖4右)。最終根據機器狗末端的目標位置(例如自轉過程中的足部軌跡),計算出各關節需達到之角度,藉逆向運動學方程式求解,可將其轉換為各關節馬達的目標角度,從而實現機器狗之行走。
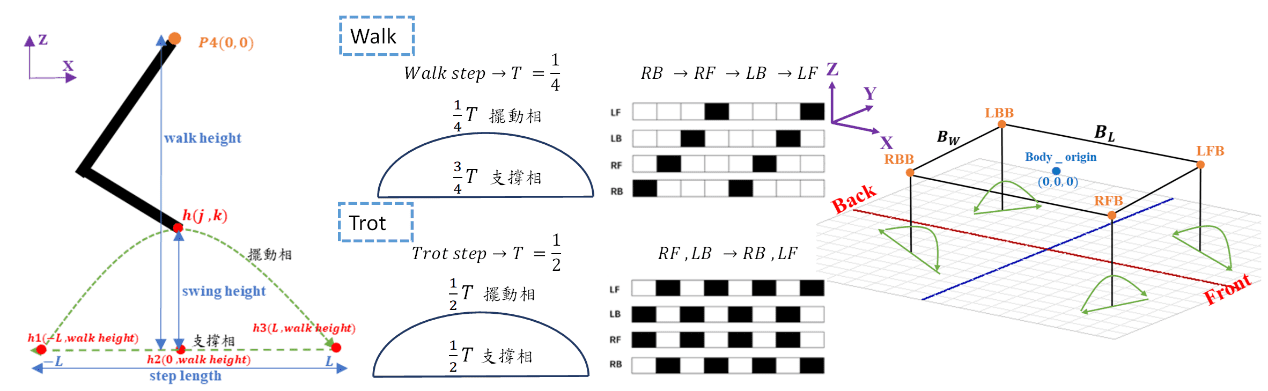
圖4:仿生機器狗之步態研究分析圖
慣性量測單元(IMU)之平衡控制與驗證
除了行走,未來如需應用於遞送貨物或搭載手臂使用時,其行走時身體之穩定度也是重要考量,本研究於機器狗身上配有一慣性量測單元(Inertial Measurement Unit;IMU)來測量物體加速度、角速度等物理量,並於機器狗行走過程中,透過這些物理量的變化,偵測其姿態變化,以及計算出其在空間中的座標位置,進而提供即時的回授控制,提高機器狗在複雜地形行走時身體之平穩性。圖5(左)為機器狗之平衡實驗,透過改變地面之水平,驗證機器狗之平衡能力,圖5(右)是機器狗於顛簸路面行走時之IMU回授,整體機身傾斜程度在3度以內。

圖5:IMU之平衡控制實驗
機器狗自動導航定位技術與驗證
在機器狗具備行走與平衡能力之後,就可以搭配光達與相機感測器,以進行自主導航之目的。同時搭配同步定位與地圖構建(Simultaneous Localization and Mapping;SLAM)之演算法,能實現精準的定位與導航,提升機器狗整體之穩定。
在機器狗的空間定位上,採用光達作為主要定位感測器,透過光達所掃描之資料結合SLAM地圖建置與定位演算法來實現自主導航。本研究中,機器狗定位與建圖是採用Hector SLAM,不需使用里程計,所以適用於無人機和地面車輛在不平整區域建立地圖,此外,還加入自適應蒙特卡洛定位法(Adaptive Monte Carlo Localization;AMCL),此為一種基於粒子濾波器的定位技術,可估測未知環境中之位置與方向,其特點為能夠自適應調整粒子數,以達到更高的定位精度和計算效率。
最後,本研究使用Timed-Elastic-Band路徑規劃演算法來實現自主導航,其演算法之核心架構為在考量運動學、路徑偏差、障礙物和時間等各項成本中,透過權重來計算,使最終之軌跡規劃最小化與平衡上述之成本問題;除上述導航演算法外,當有突然出現之障礙物進入雷達設定之安全範圍內時,會即時停止,以避免發生碰撞。圖6為機器狗自主導航定位技術之實驗測試,最終機器狗皆能到達目標位置,並且誤差距離都在合理範圍8cm內。此一實驗之影片可連結網址:https://www.youtube.com/watch?v=CRtlTXbYczo。
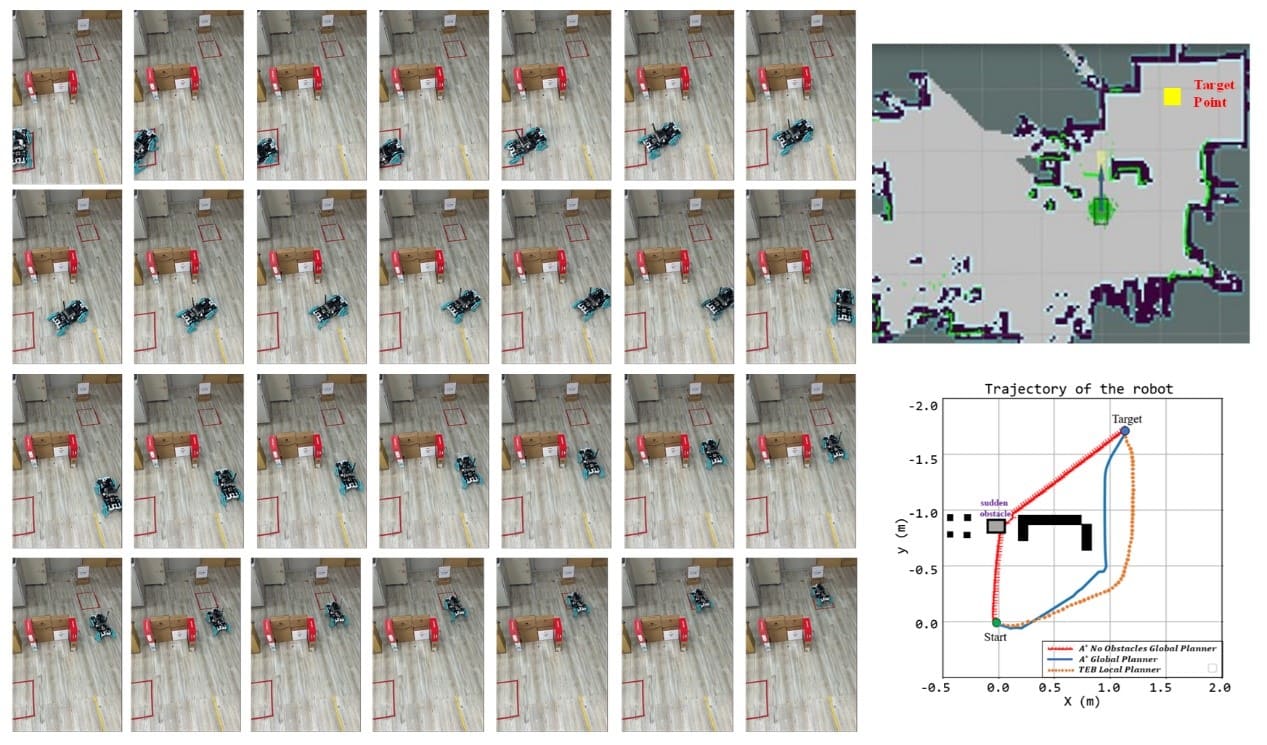
圖6:自動導航定位技術之驗證實驗
未來展望
本研究設計了一隻擁有12-DOF的仿生智慧機器狗,藉由逆向運動學與步態規劃驗證了其行走之可行性,並搭配多種感測器優化步行穩定度,最終藉由導航技術實現「自主」行走。由於此一研究為PLA所列印之雛形機,尺寸與機械強度並不符合實際運作之要求。目前,本團隊已完成金屬加工,且較符合實際應用尺寸之新版本機器狗(如圖7所示),我們正著手運動控制程式之轉換,讓新的機器狗可以呈現先前PLA版本之運動模式與功能。


圖7:新版本之金屬製作機器狗
除此之外,我們也將研發具備跨越障礙物與爬階梯能力之演算法,同時導入AI機器學習、強化學習等技術;進而透過相機與AI達成物體識別能力,導入強化學習提升在不同環境下之適應與控制策略,期許未來能應用於戶外環境,並完成更複雜與挑戰之任務。(本專題策畫/工學院林沛群副院長&工學院江茂雄院長&物理治療學系鄭素芳教授&理學院葉素玲副院長)
參考文獻:
[1]Boston Dynamics機器狗Spot:https://www.bostondynamics.com/products/spot
[2]G. Bledt, M. J. Powell, B. Katz, J. D. Carlo, P. M. Wensing, and S. Kim, "MIT Cheetah 3: Design and Control of a Robust, Dynamic Quadruped Robot," in 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 1-5 Oct. 2018 2018, pp. 2245-2252, doi: 10.1109/IROS.2018.8593885.
[3]T. Dudzik et al., "Robust Autonomous Navigation of a Small-Scale Quadruped Robot in Real-World Environments," in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 24 Oct.-24 Jan. 2021 2020, pp. 3664-3671, doi: 10.1109/IROS45743.2020.9340701.
[4]朱建樺,具有自主導航之機器狗設計與實現。國立臺灣科技大學電機工程系碩士論文,2023。
郭重顯小檔案
郭重顯博士為臺灣大學機械工程學系教授,並兼任副系主任。郭博士曾任教於臺灣科技大學電機系,也擔任過臺灣科技大學醫工所所長、電機系主任、工業4.0中心主任。2021年八月起於臺灣大學機械系任教,並成立自主暨軟式機器人實驗室(Autonomous & Soft Robotics Laboratory/ http://asrlab.me.ntu.edu.tw/ )。郭博士專長為軟式機器人、人形機器人、多足結構機器人、自主移動機器人、機器學習、機器視覺等。

