


~智慧機器人> 淺談機器人於復健與輔助領域的研究與應用
自主活動力是影響能否獨立生活其中一個重要因素。從基本的坐、站、行走、上下樓梯的功能性活動,到跑步、打球、滑雪等娛樂或健康性質的運動,都需要有一定的能力才能進行。但對於行動不便或因年紀漸長而活動力下降的人來說,執行這些活動的門檻會隨著身體機能的退化而難以達到,這些族群必須仰賴他人協助或選擇不活動,導致獨立生活的能力下降,進而影響身心靈健康。
要幫助這些族群提升其自主力可從復健訓練與日常輔助兩方面著手。復健訓練的目的是為恢復與增強活動能力,通常會由治療師團隊執行,但有這方面需求的人不少,使得人均受訓時間變短、治療師疲勞增加,導致訓練效果打折。近年來機器人於復健領域的應用不但能提供穩定長時的訓練,還可提供多樣化與客製化訓練,同時減少治療師的勞動負擔與受傷風險,可更專心於監控受訓者的變化。日常輔助的目的為協助使用者達到執行活動的門檻,常見的輔具如助行器等仍需依靠使用者自身的能力才能幫助活動,以致此類通用設計常無法顧及自主能力低的人。為此調整應用方向,讓機器人本身提供額外輔助力,可因應不同環境給予相對應輔助,並藉由機器人監測來調整輔助程度,降低照護者從旁協助的辛勞。
機器人的型態隨著應用的不同而有所不同。目前常見的類型主要為工業機械手臂與自主移動機器人,如掃地與送餐機器人。由於復健與輔助領域目的在協助人,其應用設計以人為出發點,並注重其與人的互動,因此型態上不局限於前述兩種或人型機器人。以下介紹幾種復健與輔助機器人常見型態。
終端式機器人
終端式機器人(end-effector based robots)的特色為以控制機器人終端的狀態為主,因此僅有機器人的末端會連接在人體上,機器人主體則架設於環境中,不需穿戴,常應用於大型復建機器人平台的開發。以上肢為例,常見的為連接機械手臂末端至手腕來引導與帶動手臂的活動,並讓因肩部受傷的運動員重新訓練手臂與肩膀的關節活動度與肌力,並配合觸覺迴饋來協助執行精確運動。下肢部分則有應用平台機構帶動腳踏板來引導足部追尋健康者的走路軌跡活動,並應用於讓早期中風患者重新學習走路時腿部活動的方式。至於軀幹,常見的有懸吊式系統繫在上半身來引導軀幹的移動,以減輕體重所帶來的負擔或協助軀幹的平衡。如圖1所示,我們將八條纜繩繫至穿戴於骨盆的束帶上,藉由馬達控制每條纜繩的張力,提供欲施加於被訓練者骨盆上的力與力矩。在與樓梯機進行整合後,此復健機器人平台可藉由影響與身體質心接近的骨盆中心來進行針對爬樓梯時身體平衡與肌群合作的訓練,以協助居住在公寓與透天厝等以步行樓梯為主的群體,增強其功能活動表現。

圖1:繩驅動骨盆復健機器人平台
外骨骼式機器人
外骨骼式機器人(exoskeletons)為目前穿戴式機器人市場的主力,也最為大家所熟知。整體結構主要是用各種機械元件組成,並整合機電與控制來執行輔助或復健訓練。依動力的來源可分為被動與主動,被動式外骨骼是利用身體重量與活動本身做的功轉換成機械能或電能等儲存,在需要輔助時將能量釋放,反之亦可作為阻力訓練。以圖2為例,我們設計一具三自由度球接頭特性的被動式髖關節外骨骼,此裝置的特點是:在不影響大腿前抬(hip flexion)的自由下,利用扭轉彈簧做大腿大外展(hip abduction)的阻力訓練,可在運動員練習時穿戴,阻止過度外展並進行肌力訓練,以降低過度外展的運動傷害風險。主動式外骨骼則常使用馬達或氣壓等作為輔助力量的來源,可配合感測器做閉迴路控制,可提供較精準訓練。如圖3所示,我們使用馬達驅動一並聯式機構(parallel mechanism)的主動式頸部外骨骼,並配合眼動追蹤裝置來協助頭部無法自主移動的患者,利用人的前庭眼反射原理(vestibule-ocular reflex)來操控頭部移動。早期的外骨骼以人體的側面(矢狀面:sagittal plane)關節活動度來做設計,忽略了其他方向的運動,常造成穿戴者的不適,近來已有設計將人體關節在三個軸向的活動度納入考慮,採用被動主動混和的外骨骼,也促進了軟性外衣式機器人的發展。

圖2:髖關節被動式外骨骼

圖3:頸部主動式外骨骼
軟性外衣式機器人
軟性外衣式機器人(soft exosuits)是新興的另一類穿戴式機器人,更注重人因工程,因而逐漸受到重視。主要特色為使用大量軟性材料與軟性致動器,不使用硬式材料或僅為了固定軟性材料而使用極少量的硬式元件,整體結構較外骨骼式機器人柔軟且貼身,設計上也因為更符合人體工學而減少使用上人因性的不合用。其驅動方式主要分為纜線驅動與流體的致動兩大類。線驅動的特色為輕巧且設置簡易,以圖4為例,我們以線驅動並聯式機構為基礎,使用熱塑性聚胺酯(Thermoplastic Polyurethane, TPU)3D列印出軟性頭戴與肩部固定配件,配合渦卷彈簧在特定工作範圍的彈力為定力的特性,做出一被動式頸部軟性穿戴裝置,目前配合磁感測器可用於量測頭部三維度運動,未來可擴充為主動式外衣機器人。流體致動器中以軟性氣體致動器(soft pneumatic actuators)最為常見,其特色為輸出力大,且不會像液壓在不慎超壓而受到破壞時被液體濺到,以圖5為例,我們製作出一編織型氣動致動器,藉由編織外套與橡膠內管的相對摩擦與可延伸特性,在輸入氣壓時會依照編織的樣上伸長或縮短,可應用於推動手指彎曲以輔助增強抓握力。

圖4:頸部外衣機器人
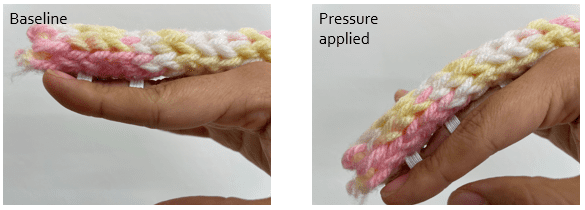
圖5:軟氣體致動器應用於手指彎曲
串接與整合機器人、復健與輔助、人因工程
機器人可以協助或代替人去執行有傷害風險或超出一般人體極限的工作,而使用者則做更高階層的規劃,並在監督的過程中,客觀審視過程,進行修改,這是應用復健與輔助機器人的特色和重要性。舉例來說,藉由使用動作追蹤系統(motion capture system)與肌電訊號量測系統(electromyography system)的迴饋,治療師可針對復健的重點來改變協作機器人與患者的互動訓練模式。目前復健與輔助機器人仍在研究與開發階段,極少數可見於日常生活中,要廣泛應用,安全性的提升是最主要的課題之一,除了緊急停止按鈕的使用,人因工程的導入可探討如何提升使用者對機器人的信賴感與提供治療師友善的操作介面。如何讓科技適性於人,在使用時將生理與心理的不適感降至最低,讓人們接受並習以為常,還需要很多努力。(本專題策畫/工學院江茂雄院長&工學院林沛群副院長&物理治療學系鄭素芳教授&理學院葉素玲副院長)
參考文獻:
[1] B.-C. Chang, H. Zhang, E. Trigili, and S. K. Agrawal, “Bio-Inspired Gaze-Driven Robotic Neck Brace,” in 2020 8th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Nov. 2020, pp. 545–550. doi: 10.1109/BioRob49111.2020.9224327.
[2] B.-C. Chang and S. K. Agrawal, “Stability During Stairmill Ascent With Upward and Downward Applied Forces on the Pelvis,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 29, pp. 1504–1512, 2021, doi: 10.1109/TNSRE.2021.3099423.
[3] B.-C. Chang and S. K. Agrawal, “Change in Muscle Synergies During Stairmill Ascent With External Forces on the Pelvis,” IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 7247–7254, Jul. 2022, doi: 10.1109/LRA.2022.3181740.
張秉純小檔案
臺灣大學機械工程學系學士、機械工程學系碩士,美國紐約哥倫比亞大學機械工程學系博士。
現任臺灣大學機械工程學系助理教授。在美國紐約哥倫比亞大學機械工程學系投入復健機器人領域的研究並取得博士學位,並在東京工業大學機械工程學系的訪問期間接觸到人工肌肉於機器人領域的應用。研究興趣為復健與輔助機器人系統的設計與控制,與探討其對人體生物力學及人因工程方面的影響,持續與實驗室學生們一起開發以人為本的復健輔助機器人與研究相關應用,幫助更多人。

