


~智慧機器人> 智慧機器人在微創手術的應用
六0年代內視鏡的發明革新了現代外科醫學,過去需要將人體解剖才能完成的檢查,僅需使用內視鏡透過微小創口便能進行初步的診斷。
微創手術的發展
醫療器材製造商開發細長、具有更多自由度的器械供醫生搭配內視鏡使用,促成微創手術(minimally invasive surgery, MIS)的發展。除了減少創口的數量與大小、加速病患的復原速度,並且減少傷口感染的機會,相較以往開放式手術也會降低病患的心理負擔,如圖1的腹腔微創手術示意[1],以一固定的遠端運動樞紐(remote center of motion, RCM)作為支點,避免傷口拉扯放大。這些新開發的工具器械和對應的手術技巧,對醫生來說要更多的學習適應與操作負擔,機器人輔助的微創手術便是在這樣的氛圍下發展。由於精密定位與控制技術在自動化機器已相當成熟,許多研究機構與醫療器械製造商便善用機器人在執行相對單調、高精度運動操作的優勢,輔助醫生執行微創手術。市面上著名的機器人系統包括Intuitive Sugical的Da Vinci手術系統、Medrobotics的Flex經口手術系統、Auris的內視鏡系統、Hansen Medical的Sensei X心導管系統等等[2]。這些機器人系統在封閉的術野中提供了更好的操作精度與靈活性,並整合感測與控制技術,大幅降低了對醫生感覺運動能力(sensorimotor skill)的依賴,並改善手術結果。

圖1:腹腔微創手術操作自由度示意圖[1]
手術行為與機電整合工程的類比
如圖2,回顧整個手術行為,醫生藉由觀察術野內組織與器械互動狀況,思考療程決策並調整器械的位置與功能。這個閉迴圈包含了三個可供思考的研究方向,分別是感測、致動與決策控制。利用與機電整合工程與手術行為架構的相似性,當前研究均朝一個或多個方向努力,目的是提升外科醫生知覺與協調運動能力,進而改善精準度、效率和安全性。感測器或醫學影像等研究可以視為醫生的強化五感,例如看到更細微或被遮蔽的目標組織;致動部分的致動器與機構設計可以視為醫生手部的延伸,進行更精密靈活的運動操作;決策控制則是基於感測回授決定操作的處理中樞,當工作環境發生變化時能快速判斷並進行動作補償,相當於危機處理和手眼協調能力。
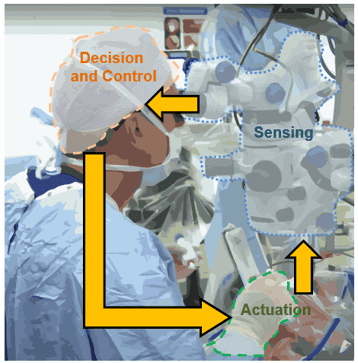
圖2:手術行為的閉迴圈系統與關鍵子系統:感測、致動、決策控制。
手部操作性的增強
從機器人系統的角度來看,操作性的增強可以透過致動器與機構設計的方式來達成,克服環境或是感覺運動的限制。舉例來說,使用核磁共振成像(Magnetic Resonance Imaging, MRI)作為穿刺導引的流程中,由於掃描腔室的空間限制,醫事人員需要將病人反覆移入移出掃描室進行穿刺針的調整與MRI掃描,流程繁瑣冗長。若能設計機器人在腔室內直接進行檢針的調整,將使療程更加流線化。但是受到掃描室強大的磁場環境影響,電磁馬達會產生操作上的安全而禁絕使用,這便促成了許多饒富創意的傳動方式或致動器設計來克服這些技術挑戰。如圖3,可以使用串珠鍊、液靜壓或纜線套索的方式,透過人手或驅動馬達,將動力傳遞至掃描室中的機構;或是從致動原理上發想,以氣動如氣渦輪的方式驅動機器人。

圖3:核磁相容傳動與致動器設計:(a) 串珠鍊傳動;(b) 液靜壓傳動;(c) 纜線套索傳動;(d) 氣渦輪致動器。
機構方面,則針對不同手術的需求與空間限制,可以發想符合該術式的設計來提升操作的穩定性與安全性。例如圖4中的眼科手術機器人IRISS,根據施術時人臉的半球面工作空間,使用了圓弧形連桿的球面機構設計[3],使得器械在移動過程中永遠穿過機構的球心作為穩定的微截口;圖4也揭示筆者目前的團隊則借鑑人手握持器械的姿態,開發了串並聯複合式機器人系統OPTECHS,有更佳的剛性、緊緻的尺寸以及進行更換器械的功能等。這些機構利用驅動馬達的高重複精度和控制訊號的可縮放性,能進行更為精巧的操作。
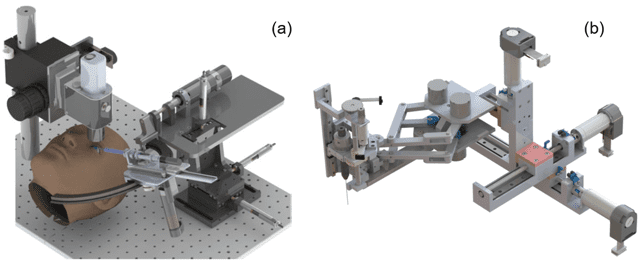
圖4:眼睛手術機器人機構設計例:(a) UCLA團隊的串聯式機器人IRISS[3];(b) 筆者目前開發的混合式串並聯機器人OPTECHS。
感知能力的擴增
利用感測器與醫學影像技術,機器人可以在某些層面超越人類的五感,補償術野中原先無法取得或精確度不足的資訊。其研究方向大致可分為應用於某些術式的感測器或成像原理開發、影像識別與判斷、既有感測技術精度與處理速度的提升等。
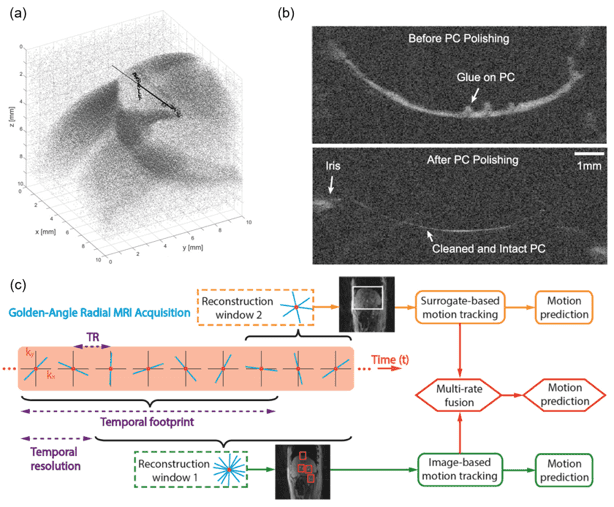
圖5: (a) 使用OCT可視化角膜上的微截口;(b) 使用OCT可視化水晶體背囊上的殘留物(上)與清除後(下);(c) 利用MRI徑向取樣的原理結合高解析的低速影像和低解析的高速影像。
例如圖5於眼睛使用光學干涉成像(Optical Coherence Tomography, OCT)技術,利用類似超聲波反射回波的概念,將顯微鏡下難以感知的半透明組織如角膜、水晶體背囊等以精確的二維或三維解剖學構造建立出來。搭配電腦視覺和人工智慧,將裨益診斷與術前療程規劃[3]。若是要作為機器人即時的術中導引,如何加速醫學影像的取樣辨識速度便顯得更為重要。圖5中的另一個例子則是利用MRI在頻域(frequency domain)空間中取樣的成像原理,以徑向取樣(radial acquisition)的方式同時進行高解析的低速影像和低解析的高速影像擷取,並利用腹腔器官為類週期運動的先驗知識(prior knowledge)將前兩者融合,得到能作為即時導引的高品質影像[4]。

圖6:控制應用例:(a) 學習控制產生精密器械軌跡進行水晶體背囊拋光;(b) 適應性控制器械運動與呼吸起伏腫瘤同步。
智慧型控制
當機器人具備了致動與感測系統,接下來有趣的便是如何根據感測資訊的反饋產生致動命令。根據不同的任務需求,通常仰賴系統整合或控制工程師將其轉化為數學最佳化問題(optimization problem),並以數值演算法進行求解。許多問題事實上在控制領域已有長足的研究,例如圖6中的眼睛機器人需要精密控制其器械末端在僅有數十微米的水晶體背囊上進行拋光,將殘留的白內障組織移除[5]。這在控制工程中是一個經典的軌跡追蹤問題(trajectory tracking),能夠利用對於受控機器人系統的特性了解,產生最適合的命令以達成精密運動控制,圖中比較追蹤控制器使用前後的效果。圖6中的另一個應用例則是使用機器人控制器械,保持針尖與受生理運動如呼吸影響的目標組織間的距離,在控制上為一個擾動抑制的問題[6]。利用生理運動訊號的歷史資訊和對機器人系統的知識,可以適應性地產生最佳控制訊號預測類週期的呼吸波形,讓施術者可以只控制相對於組織的穿刺深度,而無須費心於生理運動的補償。
結論與展望
微創手術機器人系統是既有機電整合工程與自動化技術的新興應用。有時因應其使用需求,也可能導引基礎科技的發展;即便是同樣一個問題,常會因為不同學科背景的人而能發想出不同的解決方案或跨領域的搭配組合,是其迷人之處。
臺灣已具有機器人與自動化技術之相關零組件產業聚落與技術,如控制器、感測器、致動器、精密機構與機械零件加工製造等。由於微創手術機器人需要軟實力與硬實力的整合,可為個別零組件產業轉向具有高附加價值及高競爭力之利基。在面對人口高齡化的同時,針對精準醫療投入之研究開發也切合國家發展需求。(本期專題策畫/工學院院長江茂雄教授&工學院林沛群副院長&物理治療學系鄭素芳教授&理學院葉素玲副院長)
參考文獻:
[1]Prince, Stephen W., et al. "A robotic system for telementoring and training in laparoscopic surgery." The International Journal of Medical Robotics and Computer Assisted Surgery 16.2 (2020): e2040.
[2]Peters, Brian S., et al. "Review of emerging surgical robotic technology." Surgical endoscopy 32 (2018): 1636-1655.
[3]Chen, Cheng‐Wei, et al. "Intraocular robotic interventional surgical system (IRISS): semi‐automated OCT‐guided cataract removal." The International Journal of Medical Robotics and Computer Assisted Surgery 14.6 (2018): e1949.
[4]Li, Xinzhou, et al. "Respiratory motion prediction using fusion-based multi-rate Kalman filtering and real-time golden-angle radial MRI." IEEE Transactions on Biomedical Engineering 67.6 (2019): 1727-1738.
[5]Lee, Yu-Hsiu, et al. "Accurate Robotic Posterior Capsule Polishing With Tissue Stabilization." IEEE/ASME Transactions on Mechatronics (2023).
[6]Lee, Yu-Hsiu, et al. "Adaptive tracking control of one-dimensional respiration induced moving targets by real-time magnetic resonance imaging feedback." IEEE/ASME Transactions on Mechatronics 25.4 (2020): 1894-1903.
李宇修小檔案
臺大機械系學士(2007),機械研究所設計組碩士(2009)。畢業後曾在綠點高新科技股份有限公司捷普設計服務分公司、佳世達科技股份有限公司擔任機構設計工程師,之後赴美國加州大學洛杉磯分校航太暨機械工程學系系統控制組進修,取得博士學位。專長為醫療機器人、適應性與學習控制、物理系統建模與創新機構設計。目前實驗室研究方向包含眼科手術機器人、核磁共振與超音波導引之機器人輔助治療、控制技術在各種機電系統的應用,例如光學掃描振鏡、小型衛星、伺服運動系統和陽壓呼吸器等。

